TECHNOLOGY
技術特性
世界初!人間を抱き上げるロボット
![]()
技術特性 1. 触覚による力仕事の実現
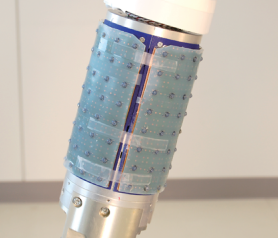
腕の広範囲に設置した触覚センサによって,ロボットの動作中の微調整や動作の一時停止・再開などの操作が可能です. |
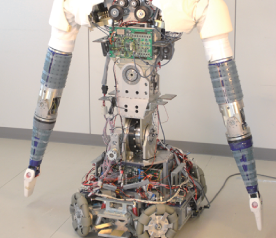
技術特性 2. 関節構造
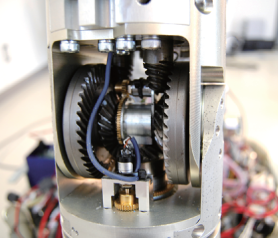
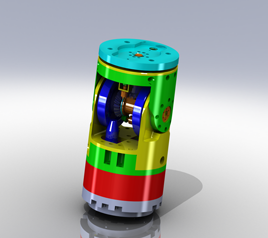
RI-MANの関節配置を見直すことにより,抱き上げやすい関節位置を実現しました。また,抱き上げに重要な関節の構造を見直し,腕の太さをRI-MANより細くし,関節の出力トルクや剛性を上げました. |
技術特性 3. 視聴覚による人物の追跡

RIBAは2台のカメラと2本のマイクを備えており,音と視覚を用いて人物を追跡することが可能です.人物が視野内にいる場合には,顔認識によって人物の位置(方向・距離)を推定し,人物を正面に捉えて追跡します.また、マイクによる音源定位機能を持っていて,音が入った場合には音源が視野内に入るように回転します.これは,人物が視野外にいる場合に,視野内に捉えるために使えます. |
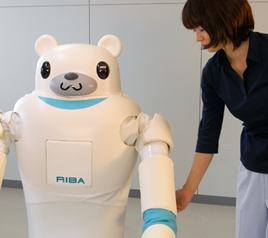
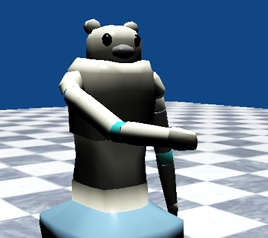
技術特性 4. 柔らかい外装


RIBAの外装は,柔らかい素材で覆われています.特に腰や肘部分は,巻き込みを防止することを目的に,関節部分を柔軟素材で覆っています.柔らかい素材を使用することで,抱き上げ時に人とロボットの接触部分に与える負担を軽減しています.人に親しみやすいクマのぬいぐるみのようなデザインを採用しました. |
技術特性 5. 台車移動
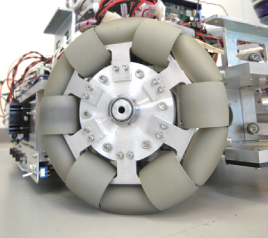
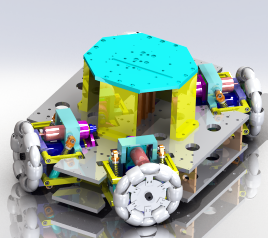
RIBAの台車はオムニホイールを採用しており,台車の姿勢を保ったまま前進や後退,回転,左右への移動を行うことができます.狭いベッドやベッドの間にも姿勢を保ったまま移動することができます.台車部分には,バッテリーや制御用PCを内蔵しています. |
技術特性 6. 触覚ガイダンス

直接振れることで、触覚を介してRIBAを操作できます。人間が他人に動作を「手取り足取り」教えるように,動かしたい関節に直接触れ,操作の方向と 動きの方向を合わせられるので直感的です.また、触覚のパターン処理により,抱き上げ時に腕にかかる荷重をキャンセルすることなどができます. |
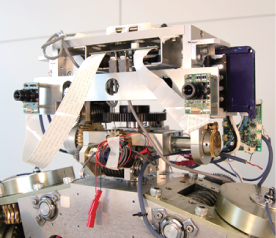
技術特性 7. 動力学シミュレータ
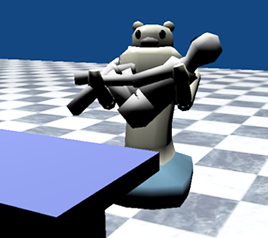
センサやアクチュエータの実物と統合でき,接触による干渉や重力などの力学を反映できるシミュレータを開発しました.動作の生成,プログラム作成環境,干渉チェックなどの目的で使用できます. |
技術特性 8. 抱き上げ動作の生成
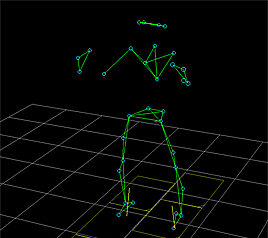
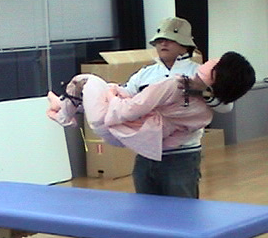
RIBAの抱き上げ動作の生成には,モーションキャプチャを使用し,人間が抱き上げるときの動作を解析することによって得られた知見をRIBAの動作に反映しています. |