ロボット制御研究チーム
本研究チームでは、介護支援ロボットの開発において、移乗などの作業を支援することに焦点を当て、人とロボットの接触動作の表現と制御、安定な移乗を実現するための機構と制御の同時最適化、被介護者の感性を考慮した安心感を与える運動制御システムの構築、新しい機能材料を用いた制御系設計等、安全かつ人との親和性の良い制御系の構築に関して基礎研究および応用研究を行っています.
研究課題
介護支援ロボットの安全・安心・快適を追求するシステム
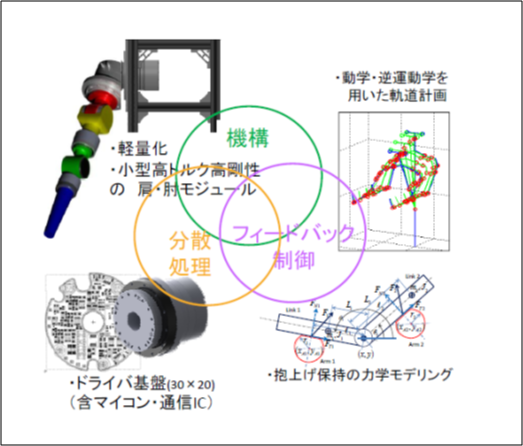
- テーマ1: 安心・快適な移乗動作を実現する機構とフィードバック制御
- テーマ2: 各種センサ統合と被介護者の感性フィードバックによる快適性の向上
- テーマ3: 安全と信頼性を高めるネットワーク分散制御
ソフトウエアに適したハードウエア(材料)、ハードウエア(材料)に適したソフトウエアの両面の視点を重視し、以下の課題に挑戦しています。
軽量化と高出力(材料+機構+アクチュエータ)
剛さと軟らかさの共存(制御:運動の方向や速さによる切り分け)
被介護者の感性、特に抱き心地や安心感を各種センサを統合することで定量的に検出し、介護ロボットにフィードバックすることで抱き上げ動作を改善することに挑戦しています。
超小型汎用コントローラを多数利用し、体内ネットワークの多重化と階層制御によって、安全性と耐故障性を高めることに挑戦しています。
センサ/アクチュエータ性能を最大限に引き出すシステム
- テーマ4:複数アクチュエータの協調とDynamics(慣性力)を利用した制御
- テーマ5:立ち上がり、歩行の補助(対象:要介護度2)のためのセンサーレス・インピーダンス制御
小型アクチュエータによる大出力生成
モータ電流値あるいは肩関節用力覚センサーによるトルク推定
セルフセンシング・アクチュエータの開発(スマートラバー)