TECHNOLOGY
Technology Details
World's first robot that can lift up a human in its arms
![]()
Technology Details 1. Heavy physical work using tactile sensors
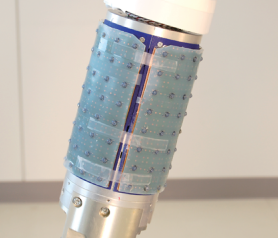
Robot motion is adjusted or suspended/resumed by touching tactile sensors mounted RIBA's arms. |
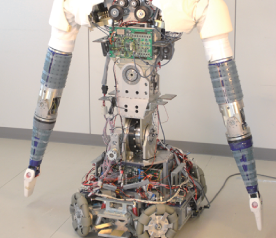
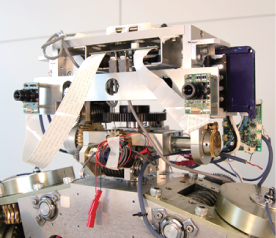
Technology Details 2. Joint Structure
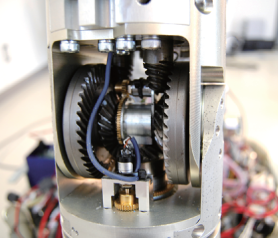
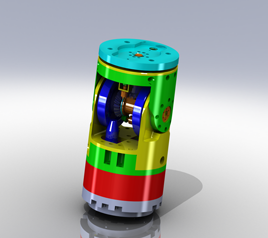
RIBA has joint positions and link lengths designed for lifting up a human. It has slim arms and each joint structure has high rigidity and high output torque. These are designed on the basis of the study of our previous robot, RI-MAN, and improvements to its structure. |
Technology Details 3. Following Operator using Vision and Audition

RIBA has 2 cameras and 2 microphones, and can follow an operator using vision and audition. When the operator is inside its view, RIBA detects the position (direction and distance), and moves to the operator's front. RIBA also detects sound source direction. RIBA uses this function to capture the operator inside its view. |
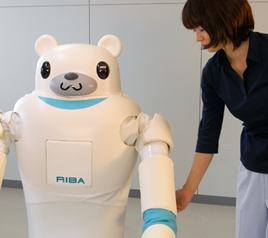
Technology Details 4. Soft Body


RIBA's body is covered with soft materials. In particular, the elbow and waist joints are isolated, making RIKA safe for physical interactions with humans. This softness also contributes to patient comfort when they are being lifted. RIBA is shaped like a teddy bear to put patients at ease and to give a friendly, non threatening, appearance. |
Technology Details 5. Base Movement
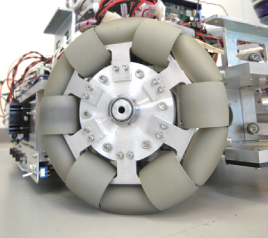
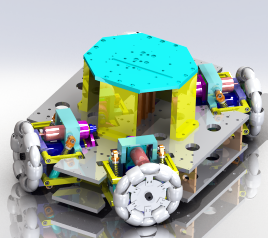
RIBA's base has omni-wheels and can move to any direction. It can move into the narrow space between beds in hospital rooms. The batteries and the main computer are mounted in the base. |
Technology Details 6. Tactile Guidance

You can control RIBA's motion by directly touching its tactile sensors. This is an intuitive control method because the contact position and force direction coincide with those of the desired motion. By pattern processing RIBA can detect the operator’s touch even when in the process of lifting a human. |
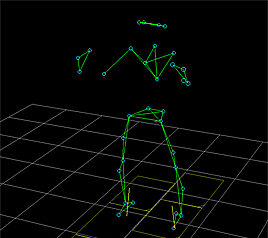
Technology Details 7. Dynamic Simulator
We developed a dynamic simulator that can integrate real and virtual sensors and actuators, and perform dynamic simulations. This is used for motion planning, software tests, collision checking, and so on. |
Technology Details 8. Motion Planning for Lifting up a Human
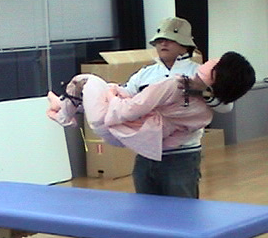
Motions are planned based on the knowledge obtained by analyzing human motions, which are recorded by our motion-capture system. |