Robot Control Research Team
In the development of robots for nursing and care, which support care workers with strong force, we focus on fundamental researches and their applications on safety and human friendly control, e.g., interaction control between human and robot, simultaneous optimization of structure and control, emotion-based motion control, control for smart materials, etc.
Research Topics
System and Control for Safety, Security, and Comfort of Nursing Support Robot
- Topic 1. Feedback control and mechanism for realization of safety and comfortable transfer
- Topic 2. Improvement of comfort based on sensor integration and emotion feedback
- Topic 3. Enhancement of safety and reliability based on networked decentralized control
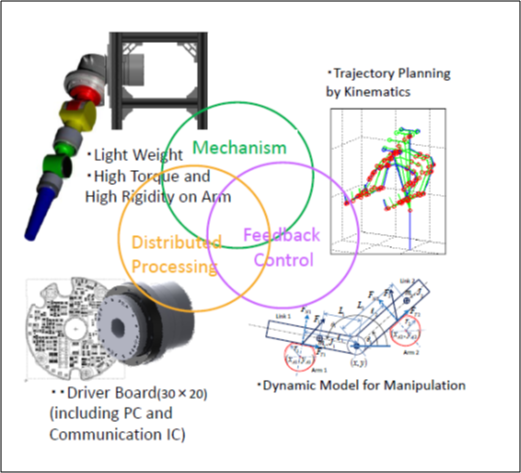
In the development of the nursing robots, a harmonious collaboration of the control system, mechanism and materials is crucial issue. From viewpoint of this collaboration, the following two problems are addressed:
1. Reduction of the weight while increasing the power.
(materials, mechanism and actuators are designed simultaneously)
2. Coexistence of ‘solid’ motion and ‘flexible’ motion, and their appropriate distribution in the task space.
One of the important challenges in the design of nursing robots is to realize the adaptation mechanism based on emotion of the supported elderly person. The emotion is detected by integrating the various kinds of sensing information and is fed back to the nursing robot to improve the supporting motion. In particular, the comfort and relief are focused as the important emotion.
When controlled objects are complex and/or large-scaled, it is necessary to guarantee an indispensable performance even under troubles and failures on parts of systems. Decentralized control strategy is suitable to achieve this reliability. The safe and fault tolerant control system is realized by ultra small processors together with multiple network and hierarchical control architecture.
System and Control for bringing out Maximum Performances of Sensor/Actuator
- Topic 4. Giant power generation by using dynamics
- Topic 5. Sensorless impedance control for supporting stand-up and walking behavior
The object of multi-bodies has a potential power; when multi-bodies are controlled even by tiny actuators, it could totally generate huge force or torque at the moment of actuators’ phases harmonizing. This subject is challengeable to establish a mechanism of generating impulsive and giant power.
This subject aims to develop a signal processing technique to estimate the necessary information for supporting the stand-up and walking behavior from limited sensing information. In particular, the following two subjects are focused:
1. Estimation of the necessary torque from the current signal in the motor and force sensor
2. Development of the self-sensing actuator (smart rubber)