TECHNOLOGY
技術特性
床から80kgの人を抱き上げられるロボット

技術特性 1. 触覚による力仕事の実現

SRセンサは、外部から力を受けて変形した時に、ゴム電極間の静電容量変化を測定して圧力を求めます。RIBA-IIの腕と胸に導入することで被介護者の体重検出と触覚を用いたロボットの操作を可能にしました。 |
技術特性 2. 機構の特徴
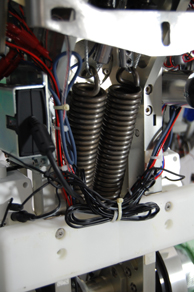
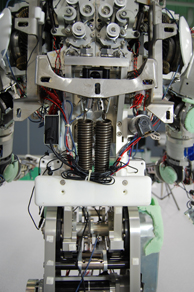
腰に2個の前後屈曲関節を設けることで姿勢を低くすることができ、床やベッドからの抱き上げができるようになった。さらに、腰関節に補償ばねを導入することによりモータの小型化と省電力化を実現した。 |
技術特性 3. 柔らかい外装


RIBA-IIの外装は,柔らかい素材で覆われています.特に腰や肘部分は,巻き込みを防止することを目的に,関節部分を柔軟素材で覆っています.柔らかい素材を使用することで,抱き上げ時に人とロボットの接触部分に与える負担を軽減しています.人に親しみやすいクマのぬいぐるみのようなデザインを採用しました. |
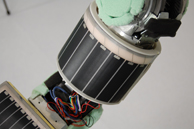
技術特性 4. 台車移動


RIBAの台車はオムニホイールを採用しており,台車の姿勢を保ったまま前進や後退,回転,左右への移動を行うことができます.狭いベッドやベッドの間にも姿勢を保ったまま移動することができます.台車部分には,バッテリーや制御用PCを内蔵しています. |
技術特性 6. 障害物検知
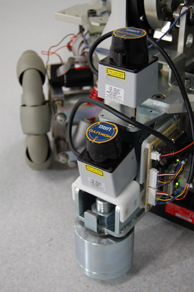
障害物検知のために、非接触のレーザーレンジファインダーと接触式のバンパーセンサを搭載しています。バンパーセンサーは抵抗増加型のSRセンサーを採用しています。 |
技術特性 7. 操作性の向上


背中にタッチパネルを導入し、介護者が被介護者個々の介護データに基づいて動作指示や作業確認をできるようにしました。さらに介護者の指示通り自動移動できるようにライントレース自律走行を導入するなどの改良を行いました。 |