研究目的
多関節多指ロボットハンドに,人間の手と同様な器用な作業をさせる.
研究背景
多関節多指ロボットハンドは,多くの関節と指を持ち,器用な作業ができる可能性があります.
しかし,多数の自由度を協調的に動作させるプログラムの作成は,容易ではありません.
この問題を解決する手法のひとつが,手作業時の人間の手指の動作に基づいてロボットハンドの動作プログラムを生成する
Programming by Demonstration [K. Ikeuchi, 1994], [Y. Kuniyoshi, 1994]です.
この手法では,人間の教示作業の内容を認識し,その認識結果に基づいてロボットハンドのプログラムを生成することで,
人間の手と同様な器用な作業を実現しようとしています.
私は主に,人間の手作業の内容を認識するための研究をしています.
研究成果
人間の手作業の内容を認識するために,素子分散型触覚センサを用いることがあります.
その際に,少数のセンサ素子で多数のセンサ素子と同程度の認識性能が得られる配置を決定する手法を提案しました.
提案手法
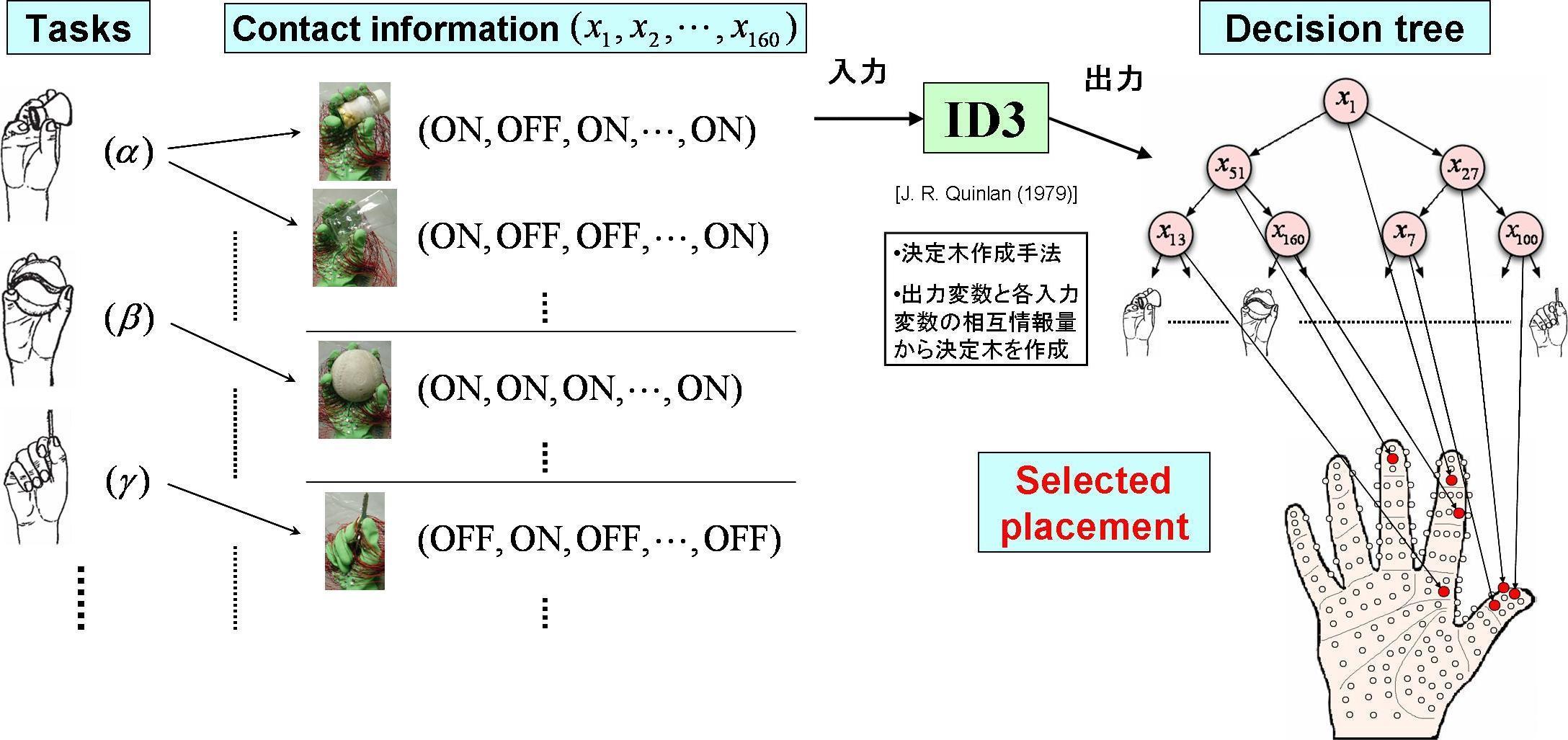
教示作業を行っている際の,人間の手と作業対象物体との接触状態を計測するために,
手掌部全体に160個のバイナリスイッチを配置したセンサグローブを開発しました.
センサグローブを装着した状態で物体の把握を行い,接触情報を取得します.
取得した接触情報を,教師あり学習アルゴリズムであるID3に入力します.
ID3は,各スイッチから得られる情報量に基づいて,最低限のスイッチから教示作業の内容を認識する決定木を作成します.
作成された決定木に使用されているスイッチから,手作業の認識に効果的なスイッチの配置を決定します.
提案手法により選択された少数のスイッチを用いれば,多数のスイッチを用いた場合と同程度の精度で教示作業の認識を行えることを確認しました.
|



|