Research Theme
Dexterous manipulations by multi-jointed multi-fingered robotic hands
Background
A multi-jointed multi-fingered robotic hand is a potentially dexterous hand like a human hand.
However, it is very difficult for us to manually and directly write a motion program
of multiple fingers moving synchronously and cooperatively to execute a task.
Programming-by-demonstration [K. Ikeuchi, 1994], [Y. Kuniyoshi, 1994] is often used in order to overcome this difficulty.
In the programming-by-demonstration, a task program for the robotic hand is generated based on the motion data of actual tasks executed by a human hand.
I'm currently proceeding researches about recognition of the motion data of actual tasks executed by a human hand.
Proposed Method
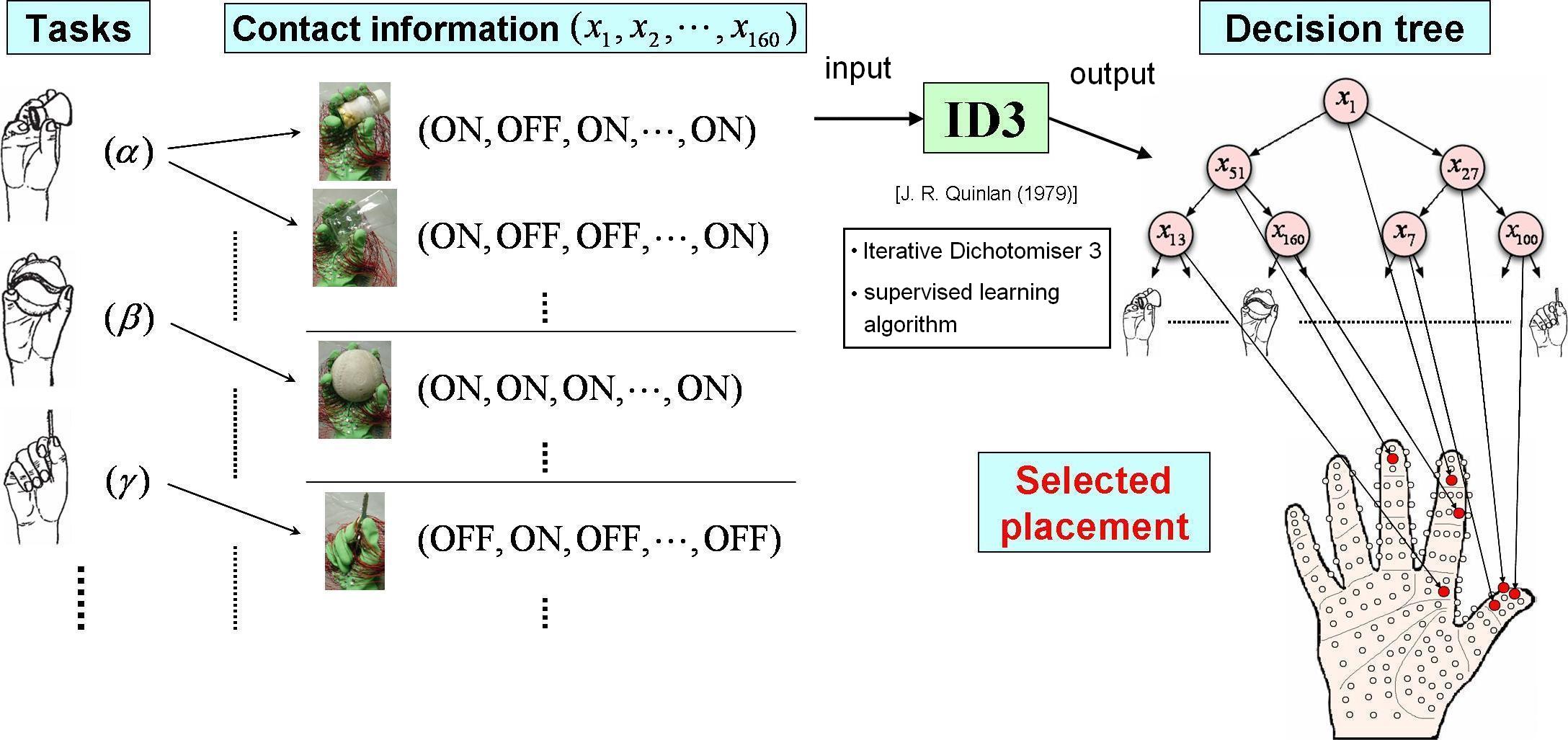
Contact information between a human hand and a grasped object is being used to advance the recognition of the motion data of tasks.
We proposed a decision method for effective placement of tactile elements for grasp type recognition.