
 The bio-mimetic control research center of RIKEN is promoting
basic research on the flexible and dynamic motor functions
of biological systems.
The bio-mimetic control research center of RIKEN is promoting
basic research on the flexible and dynamic motor functions
of biological systems.
The goal is to create advanced engineering systems
such as a soft human interactive robot.
The robot developed here is named RI-MAN.
RI-MAN exhibits the skill and ability to realize human care and welfare tasks.
RI-MAN will become an invaluable partner robot.
Video Library
 Promotional Video
Promotional Video
|
|  Demonstration
Demonstration
|
 Feature 1. Feedback of force using tactile information
Feature 1. Feedback of force using tactile information
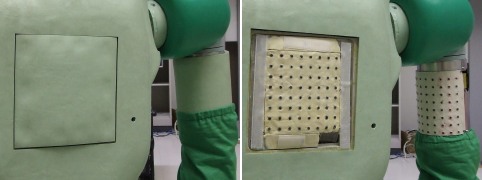 RI-MAN’s right and left forearms, upper arms, and torso are equipped
with soft areal tactile sensors that measure the magnitude and
position of contact force. Feedback of tactile information from these
sensors enables RI-MAN to physically interact with humans.
RI-MAN’s right and left forearms, upper arms, and torso are equipped
with soft areal tactile sensors that measure the magnitude and
position of contact force. Feedback of tactile information from these
sensors enables RI-MAN to physically interact with humans.
Feature 2. Human-friendly soft body
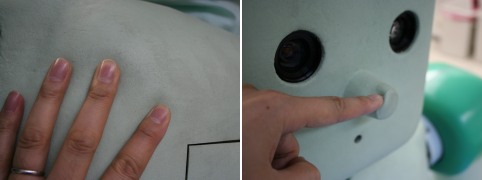 RI-MAN was developed to interact safely with humans. To achieve
physical safety in human-robot contact the whole of RI-MAN’s body is
covered with soft material and mechanical joints are physically
isolated.
RI-MAN was developed to interact safely with humans. To achieve
physical safety in human-robot contact the whole of RI-MAN’s body is
covered with soft material and mechanical joints are physically
isolated.
Feature 3. Small but powerful arms using coupled drive
 Each of RI-MAN’s arms has six joints driven by six motors. The six
motors are operated in pairs to enable combined bending and twisting
motions. RI-MAN’s arms use a mechanism called ‘coupled drive' ,
which can combine the torque of two motors. This mechanism is needed
to enable the powerful shoulder and elbow motions used when lifting
and holding a human. Although very powerful this mechanism allows
RI-MAN to have small human-like arms.
Each of RI-MAN’s arms has six joints driven by six motors. The six
motors are operated in pairs to enable combined bending and twisting
motions. RI-MAN’s arms use a mechanism called ‘coupled drive' ,
which can combine the torque of two motors. This mechanism is needed
to enable the powerful shoulder and elbow motions used when lifting
and holding a human. Although very powerful this mechanism allows
RI-MAN to have small human-like arms.
Feature 4. Motion simulation using an immersion-type 3D environment
 We can evaluate how RI-MAN will interact safely with humans by using a
virtual RI-MAN in the immersion-type 3D dynamic simulation environment
we have developed. Here we can perform simulations of the whole-body
lifting of a virtual human patient.
We can evaluate how RI-MAN will interact safely with humans by using a
virtual RI-MAN in the immersion-type 3D dynamic simulation environment
we have developed. Here we can perform simulations of the whole-body
lifting of a virtual human patient.
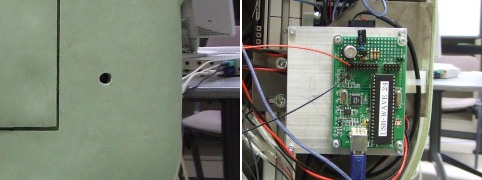
Feature 5. Decentralized control using small general-purpose controllers
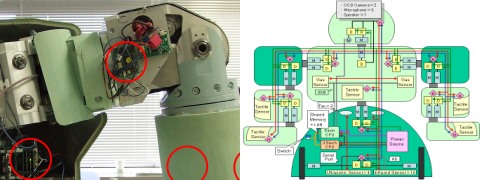 Each of RI-MAN’s joints is operated by an individual controller (a
tiny computer). A total of fifteen small controllers are installed
throughout the whole of RI-MAN’s body and these perform dedicated
motor and sensor control tasks. This distributed controller network
avoids the concentration of computational loads on the main computer
and also dramatically reduces the wiring complexity. This is a key
technology in making RI-MAN’s body so compact.
Each of RI-MAN’s joints is operated by an individual controller (a
tiny computer). A total of fifteen small controllers are installed
throughout the whole of RI-MAN’s body and these perform dedicated
motor and sensor control tasks. This distributed controller network
avoids the concentration of computational loads on the main computer
and also dramatically reduces the wiring complexity. This is a key
technology in making RI-MAN’s body so compact.
Feature 6. Sound localization using ‘ears’
 Sound source localization can be realized using two conventional
microphones combined with reflectors that act like human ears. The
horizontal direction of a sound is determined using the time
difference between sounds arriving at the two microphones, while
changes in the sound spectrum caused by the ear-like reflectors enable
judgment of front or rear direction. Using the next generation
reflectors RI-MAN can also determine the vertical direction of
sound. By combining these functions, omni-directional sound
localization is realized.
Sound source localization can be realized using two conventional
microphones combined with reflectors that act like human ears. The
horizontal direction of a sound is determined using the time
difference between sounds arriving at the two microphones, while
changes in the sound spectrum caused by the ear-like reflectors enable
judgment of front or rear direction. Using the next generation
reflectors RI-MAN can also determine the vertical direction of
sound. By combining these functions, omni-directional sound
localization is realized.
Feature 7. Tracking of a human face by integrating auditory and visual information
 The position of a human face is extracted using visual information
obtained by stereo cameras, and the position of a sound source (the
speaker’s voice) is localized using microphones with reflectors, as
described above. By integrating the auditory and visual information,
the person giving instructions to RI-MAN is identified.
The position of a human face is extracted using visual information
obtained by stereo cameras, and the position of a sound source (the
speaker’s voice) is localized using microphones with reflectors, as
described above. By integrating the auditory and visual information,
the person giving instructions to RI-MAN is identified.
Feature 8. Smell discernment by semiconductor gas sensor
 We have developed a gas sensor module that can identify several
smells. The sensing method is based on the nonlinear dynamic output of
a gas sensor in response to periodic heating. Differences in dynamic
response are used to determine the gas type and concentration. By
installing two gas sensors in the left and right sides of RI-MAN’s
torso the robot can detect important smells, such as urine, when a
patient is held in the arms.
We have developed a gas sensor module that can identify several
smells. The sensing method is based on the nonlinear dynamic output of
a gas sensor in response to periodic heating. Differences in dynamic
response are used to determine the gas type and concentration. By
installing two gas sensors in the left and right sides of RI-MAN’s
torso the robot can detect important smells, such as urine, when a
patient is held in the arms.
Feature 9. Computational architecture based on QoS
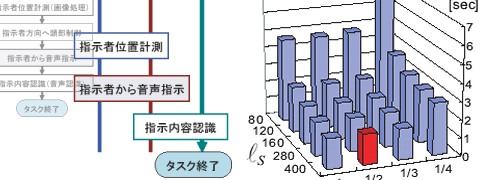 RI-MAN is equipped with a computational architecture based on the
notion of Quality of Service (QoS). Key processing operations (vision
processing, speech recognition, and so on) are dynamically prioritized
based on their contribution to completing the current task. This is
especially important when multiple recognition processes are needed
simultaneously.
RI-MAN is equipped with a computational architecture based on the
notion of Quality of Service (QoS). Key processing operations (vision
processing, speech recognition, and so on) are dynamically prioritized
based on their contribution to completing the current task. This is
especially important when multiple recognition processes are needed
simultaneously.
News
Our human-interactive robot RI-MAN was selected to be one of THE BEST
INVENTIONS of 2006 of TIME! Please visit the homepage.


Researchers
Project Leaders
- Zhiwei LUO, Toshiharu MUKAI, Shigeyuki HOSOE
| 



